[ICT活用事例]海上船舶衝突防止支援システム
概要・活用方法
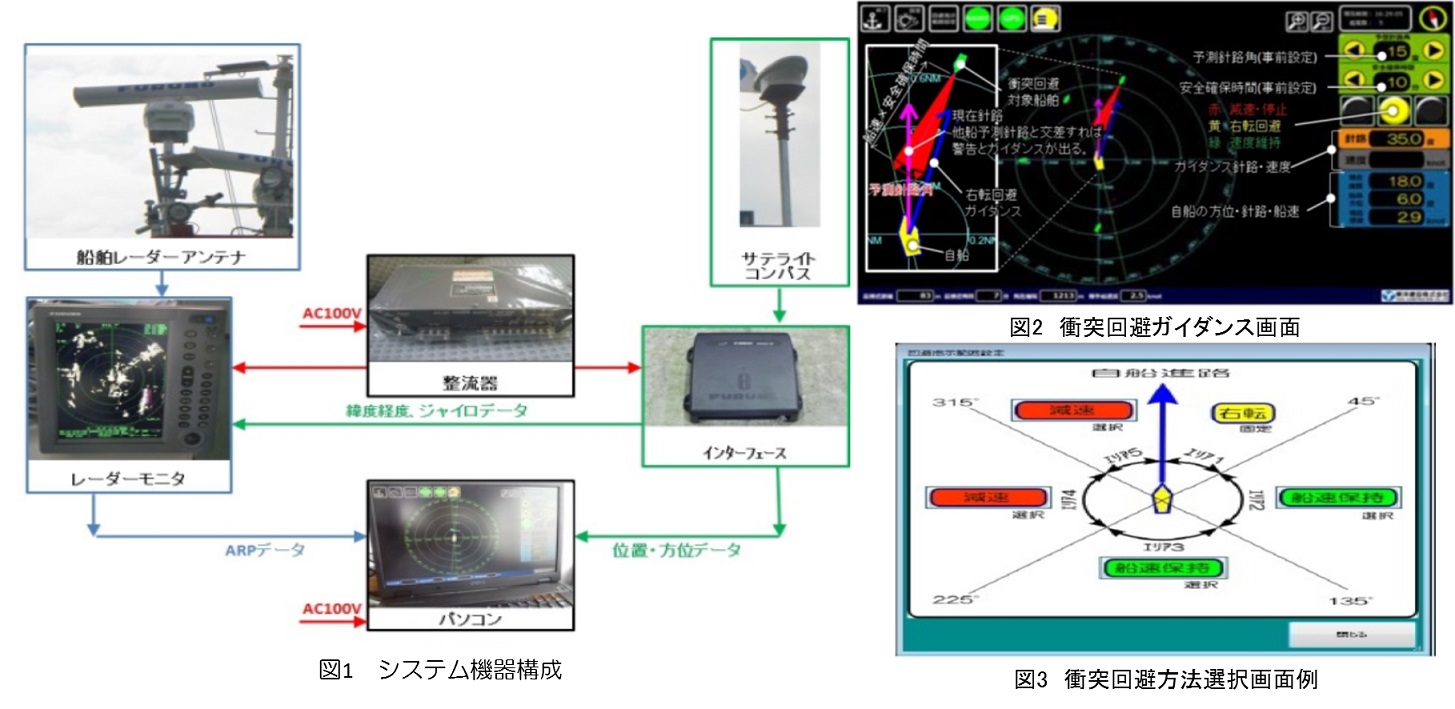
海上衝突防止支援システムは、作業船航行中にレーダーの外部出力信号を利用し、自船に接近する船舶との接触を自動で判定して衝突が予測される場合に避航・減速等の衝突回避方法をモニター上に表示して、周辺船舶との衝突防止を支援するシステムである。
特徴・効果
・自船に接近する一般船舶をレーダーで捕捉し、相手船の針路、船速、自船との距離を分析し自船を中心とした位置関係を表示する。
・自船と接近船舶の針路と速力から衝突の可能性を自動で判断し、自船の避航行動をガイダンスする。
・自動で避航指示を行うので、見落としや判断ミス・避航の遅れといったヒューマンエラーを防止できる。
活用上の注意点
自船が停止しているときにはサテライトコンパスの方位計測が不安定となるため、正確な回避指示が出せない場合がある。
残留リスク(活用上の問題点)
①残留リスクの内容と対応策
避航指示は標準的な判定によるものであり、避航行動の判断は船長の責任による。
また、船舶の操舵は自動で行わない。
対象とする主な対策(本質安全化)
- [危険作業対策]その他危険作業(海上運搬工事)
- [職場環境改善・メンタルヘルス対策]その他(海難衝突事故の防止)
| 登録番号 | 8-7 |
|---|---|
| 活用分類 | 人・行動センシング |
| 適用工事 |
|
| 作業 | 海上運搬 |
| 活用実績(件数又は現場数) | 53件 |
| 特許・実用新案 | 特許:無 実用新案:無 |
| 当該技術所有企業 | [技術の所有権] 自社 [販売] その他:(販売及びリースはしていない) |
| 第三者評価・表彰等 | 特許出願中 国土交通省NETIS登録(HRK-170001-A) |
| 当該事例紹介ウェブサイト | http://www.toyo-const.co.jp/technology/9553.html |
| 掲載日 | 2019年4月15日 |
【カテゴリ】
- [活用分類]人・行動センシング
- [土木工事]河川及び海岸工事/その他の土木工事
- [抑止可能なリスク(災害の種類)]激突/激突され/交通事故(その他)/その他
- [危険作業対策]その他危険作業(海上運搬工事)
- [職場環境改善・メンタルヘルス対策]その他(海難衝突事故の防止)
- [ICT関連]センサー/船舶/カメラ
企業情報
東洋建設株式会社 土木事業本部 土木技術部
- お電話でお問い合わせの方は
- 03-6361-5464
<当サイトの利用に関連する保証及び責任について>
当協会は、当サイトに最新の正確な情報を掲載するよう努力しますが、この情報の正確性、安全性、適切性について責任を負わず、保証するものではありません。
当サイト及び当サイトからリンクされているサイトへのアクセス及び利用する方は、自己の責任及び善良なる管理者の注意義務に基づき利用することに同意したとみなします。
当協会は、当サイト及び当サイトからリンクされているサイトの利用、アクセス又はアクセス不能の結果生じる損害及び当サイトの情報の誤謬を信頼した結果生じる損害について責任を負いません。
当サイトを活用して行う建設工事については、いうまでもなく、各事業者において、法令遵守、安全第一をもって工事の施工を行ってください。
 TOP
TOP