[ICT活用事例]アクアジャスター®を搭載した水中インフラ点検ロボット[ディアグTM]
概要・活用方法
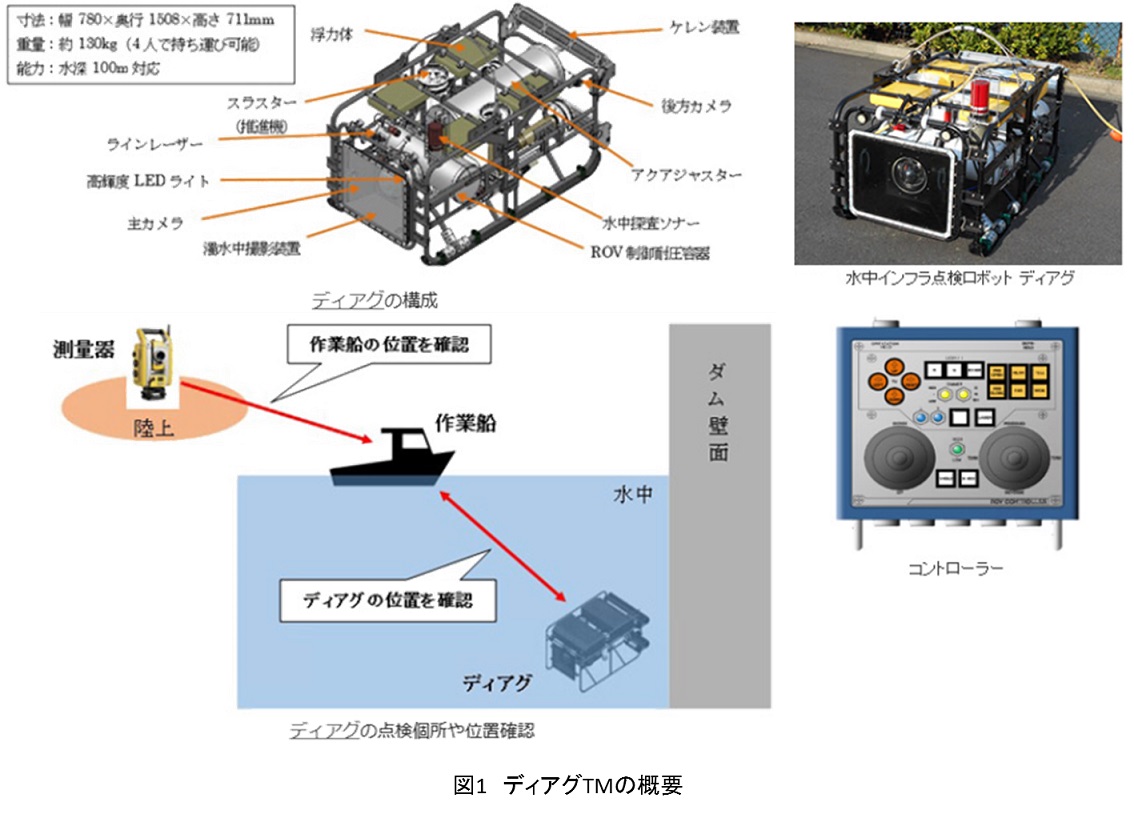
地上や船上からの遠隔操作が可能な水中点検用の無人潜水機(ROV:Remotely Operated Vehicle)。
機体にはジャイロ効果を利用した姿勢制御装置アクアジャスターを搭載していることで、水流による機体の揺れを抑え、ほぼ静止した状態で対象物を撮影することができます。(図1)
また、潜水士による点検で潜水深度約40mが限界でしたが、ディアグは100mまでの潜水が可能であり、水上からの電源供給により長時間動き続けることができます。
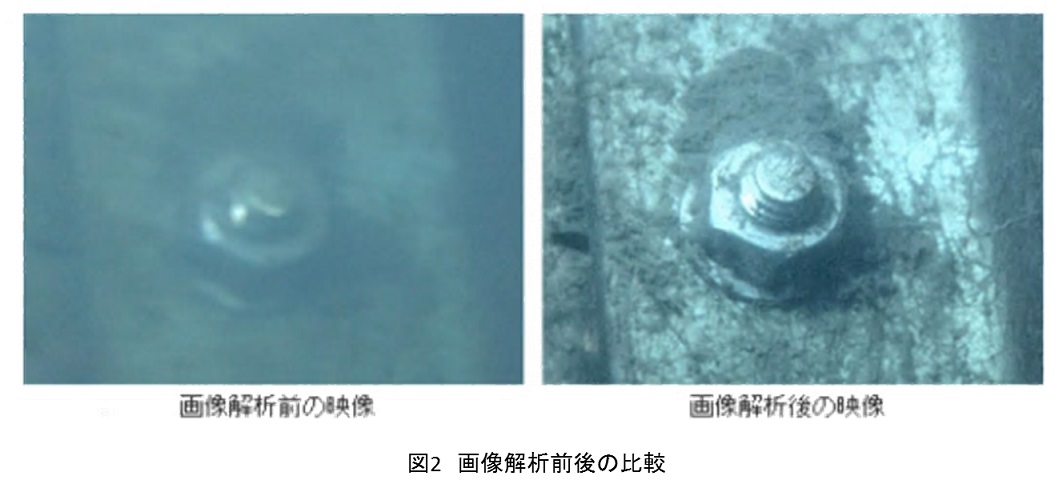
アクアジャスター®を搭載した水中インフラ点検ロボット「ディアグTM」により、水中ロボットを遠隔操作で点検作業を行う。(図2)
特徴・効果
潜水士による点検作業には作業時間の制限や潜水深度に限界があり、潜水病発症の危険を無くすため深場での作業を行う場合はチャンバー等の大型設備を用意する必要がなくなるため、潜水士の労務が軽減される。
活用上の注意点
水中へロボットを投入する際及び回収する際の転落、溺れに注意する。
操作するオペレータの姿勢が一定のため、腰を痛める恐れがある。
寒さ対策や一定時間の操作後の休憩は必須である。
残留リスク(活用上の問題点)
①残留リスクの内容と対応策
機械を水中へ投入する際、160kgの機体を4名ほどで持ち上げることがあり、腰を痛める・足を挟む・水中へ転落するなどのリスクがある。
②対応策についての今後の計画
レジャーボートでも簡単に機械を降ろせるような投入装置を検討中
自社で開発/改良したい技術
動画リアルタイム評価
対象とする主な対策(本質安全化)
- [危険作業対策]水中点検作業
| 登録番号 | 24-6 |
|---|---|
| 活用分類 | 無人化・省力化 |
| 適用工事 |
|
| 作業 | ダム提や水中インフラ構造物調査 ダム堆砂調査 濁水中のインフラ構造物調査 桟橋水中部調査 |
| 価格等 | 97,200円/月 14日間保障 |
| 活用実績(件数又は現場数) | 丸山ダム他実証試験含めると多数 |
| 特許・実用新案 | 特許:無 実用新案:無 |
| 当該技術所有企業 | [技術の所有権] 自社 [販売] 自社 |
| 当該事例紹介ウェブサイト | http://www.obayashi.co.jp |
| 掲載日 | 2019年4月15日 |
【カテゴリ】
- [活用分類]無人化・省力化
- [土木工事]河川及び海岸工事/ダム工事/水力発電所等建設工事/その他の土木工事
- [抑止可能なリスク(災害の種類)]はさまれ、巻き込まれ/おぼれ/有害物等との接触
- [危険作業対策]水中点検作業
企業情報
株式会社大林組 安全品質管理本部 安全管理室
- お電話でお問い合わせの方は
- 03-5769-1074
<当サイトの利用に関連する保証及び責任について>
当協会は、当サイトに最新の正確な情報を掲載するよう努力しますが、この情報の正確性、安全性、適切性について責任を負わず、保証するものではありません。
当サイト及び当サイトからリンクされているサイトへのアクセス及び利用する方は、自己の責任及び善良なる管理者の注意義務に基づき利用することに同意したとみなします。
当協会は、当サイト及び当サイトからリンクされているサイトの利用、アクセス又はアクセス不能の結果生じる損害及び当サイトの情報の誤謬を信頼した結果生じる損害について責任を負いません。
当サイトを活用して行う建設工事については、いうまでもなく、各事業者において、法令遵守、安全第一をもって工事の施工を行ってください。
 TOP
TOP