[ICT活用事例]吊荷旋回制御装置
概要・活用方法
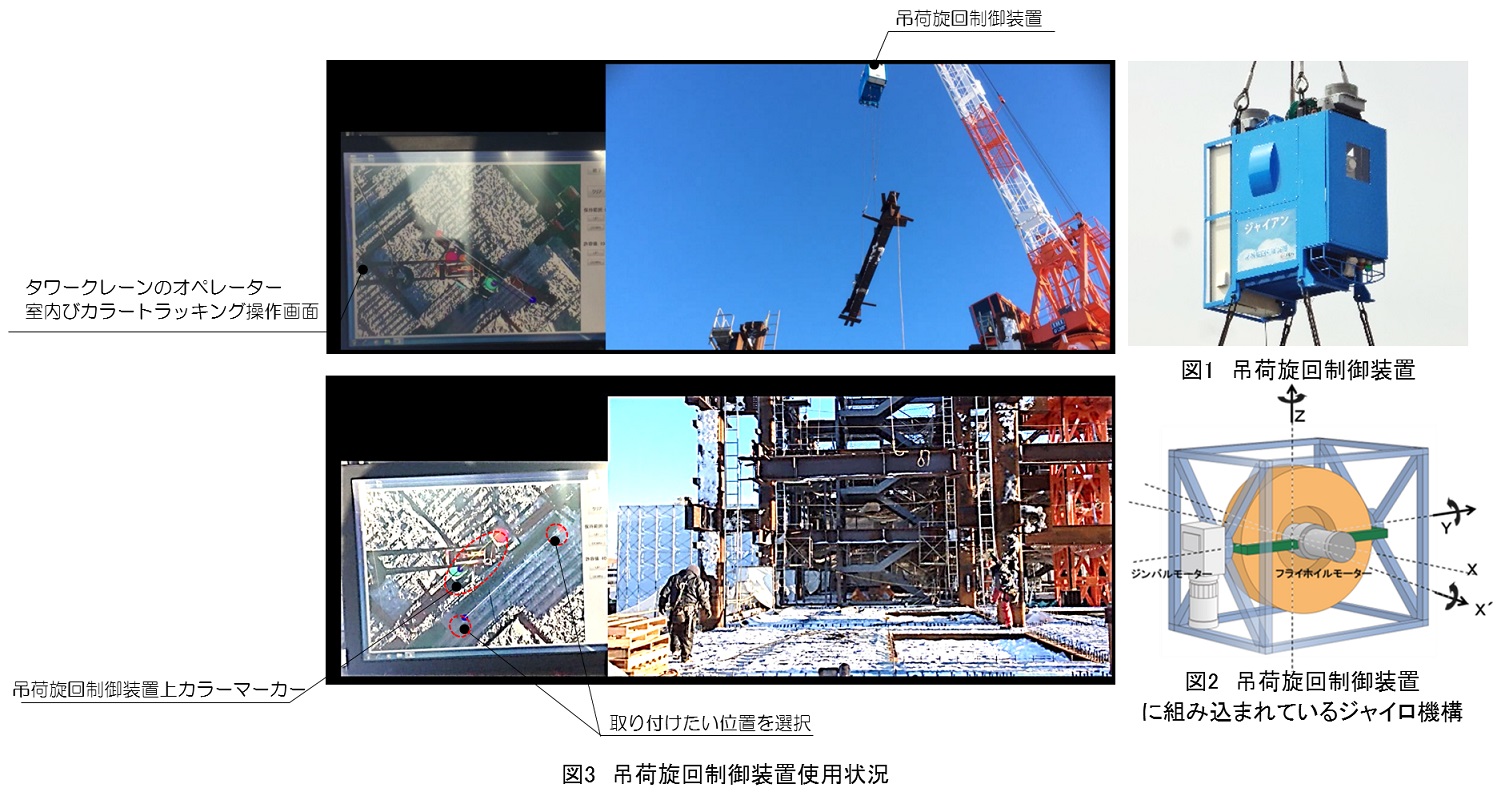
『吊荷旋回制御装置』は、ジャイロトルクによる吊荷の方向制御の能動制御にカラートラッキング手法を用いて、吊荷を目的の位置で正確に静止させられる装置である。(図1)
ジャイロ機構を用いた旋回制御方法に、受動制御と能動制御がある。受動制御は、外力で吊荷がz軸回り回転させられると、ジンバル軸(y軸)が回転し、吊荷の旋回を抑制する。
能動制御は、ジンバル軸(y軸)を回転させることで、吊荷をz軸方向に旋回させる。(図2)
部材取付け位置の角度については、タワークレーンジブトップのカメラ画像をもとにタッチパネル上で、部材取付け位置の両端と吊荷の両端ををタップするだけで、カラートラッキング手法を用いることにより把握し、取り付け位置と吊荷の実測位置から吊荷旋回角の演算し、演算結果からジンバル軸を傾斜させ、吊荷を取付位置と平行に旋回制御を行う。(図3)
特徴・効果
『吊荷旋回制御装置』を使用する事で、風やクレーンの動きに伴う慣性力等外力により吊荷が旋回し、吊荷の衝突や破損等防止する事が出来るため、揚重作業の安全性と作業効率が向上する。
また、取り付け位置付近に吊荷が到着後旋回を行うのではなく、揚重中に旋回し、屋外の状況にかかわらずカラートラッキング手法を用いて、最終位置の調整、姿勢保持を行いながら部材の取り付けを行う事が可能であり、作業時間の短縮が可能。
吊荷定格慣性モーメントは75t・m²を有しているため、15秒で10tの部材を90°旋回させる事が可能である。
活用上の注意点
タワークレーンの選定時に、本装置荷重を考慮する。
自社で開発/改良したい技術
衛星測位データによる建設機械の自動運転
対象とする主な対策(本質安全化)
- [危険作業対策]その他危険作業
- [職場環境改善・メンタルヘルス対策]生産性の向上
| 登録番号 | 11-4 |
|---|---|
| 活用分類 | 無人化・省力化 |
| 適用工事 |
|
| 作業 | 吊部材を取り付け位置の方向に旋回させるには、介錯ロープを用いる。 本装置は、取り付け位置をタワークレーンの田モニター画面をタップすることで、吊部材は自動で取り付け方向に旋回する。 また、風などの外力に対しても本装置が抵抗し、吊部材が振られることはない。 |
| 活用実績(件数又は現場数) | 3現場 |
| 特許・実用新案 | 特許:有 実用新案:無 |
| 当該技術所有企業 | [技術の所有権] 自社 [販売] 他社 |
| 第三者評価・表彰等 | 平成30年度日本建設機械施工大賞・大賞部門選考委員会賞 |
| 掲載日 | 2019年4月15日 |
【カテゴリ】
- [活用分類]無人化・省力化
- [建築工事]躯体工事/解体工事/鉄骨・鉄筋コンクリート造家屋建築工事
- [抑止可能なリスク(災害の種類)]墜落、転落/激突され
- [危険作業対策]その他危険作業
- [職場環境改善・メンタルヘルス対策]生産性の向上
- [ICT関連]AI
企業情報
![]() 戸田建設株式会社 技術開発センター
戸田建設株式会社 技術開発センター
- お電話でお問い合わせの方は
- 050-3818-5808
<当サイトの利用に関連する保証及び責任について>
当協会は、当サイトに最新の正確な情報を掲載するよう努力しますが、この情報の正確性、安全性、適切性について責任を負わず、保証するものではありません。
当サイト及び当サイトからリンクされているサイトへのアクセス及び利用する方は、自己の責任及び善良なる管理者の注意義務に基づき利用することに同意したとみなします。
当協会は、当サイト及び当サイトからリンクされているサイトの利用、アクセス又はアクセス不能の結果生じる損害及び当サイトの情報の誤謬を信頼した結果生じる損害について責任を負いません。
当サイトを活用して行う建設工事については、いうまでもなく、各事業者において、法令遵守、安全第一をもって工事の施工を行ってください。
 TOP
TOP